|
|
Einleitung:
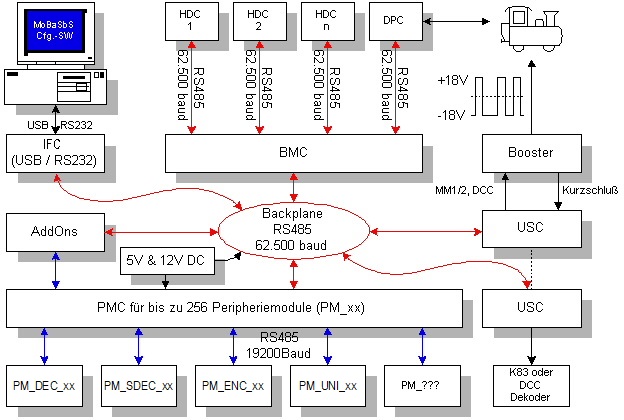
Die untenstehende Abbildung zeigt die Architektur der MoBaSbS.
Weitergehende Informationen zu den einzelnen Modulen erhält man durch Anklicken der schattierten Komponenten
im Bild
Einleitend ein paar generelle Informationen zur MoBaSbS ...
unterstützde Standarts:
|
| Protokoll: |
Lokfunktionen: |
Funktionsarten: |
Lokadressen: |
Funktionsdecoder: |
MM-1
14 Fahrstufen
|
1 Lokfunktion (Licht)
F0
|
Funktionen
tastend oder schaltend
|
80 Lokadressen
|
Märklin
Funktionsdekoder
|
MM-2
14 Fahrstufen
|
5 Lokfunktionen;
F0-F4
|
Funktionen
tastend oder schaltend
|
80
Lokadressen |
Märklin
Schaltdecoder (K83) |
DCC
14, 28, 128 Fahstufen
|
29 Lokfunktionen;
F0-F28
|
Funktionen
tastend oder schaltend
|
9999
Lokadressen
|
DCC
Schaltdecoder
|
Die unterschiedlichen Gleisformate können gemischt betrieben werden (Multiprotokollfähigkeit).
Es wird Programming on Main (POM) schreibend unterstützt. |
Der Ausdruck 'Zentrale' wird hier absichtlich vermieden, da die hier vorgestellte Elektronik eben nicht eine komplexe
Elektronik ist, die alle Funktionen 'zentral' verarbeitet, sondern vielmehr ein modular aufgebautes System darstellt, in dem jedem
Modul eine bestimmte und damit gut zu erfassende Aufgabe zukommt. Durch diese Architektur wurde auch der Programmieraufwand der
eingesetzten Mikrocontroller (verwendet wurden Mikrocontroller aus der AVR-Serie von ATMEL) reduziert und Funktionen klar
abgrenzbar gehalten.
Die Abbildung oben zeigt alle wesentlichen Komponenten der MoBaSbS.Weiterführende Informationen erhält man durch Anklicken
der schattierten Module.
gängige Modulkombinationen der MoBaSbS:
|
BMC, IFC, USC, Booster
|
Loks digital fahren auch mit Software wie Traincontroller
|
BMC, IFC, USC, HDC, Booster
|
Loks digital fahren mit Software wie Traincontroller oder dem Handfahrpult
|
BMC, IFC, USC, PMC, Booster
(wahlweise mit/ohne HDC)
|
Loks digital fahren, Weichen, Signale, etc. steuern, Rückmelden, automatisiertes Fahren mit Traincontroller
|
Ergänzung um DPC
|
Programmieren von Lokdecodern
|
Ergänzung um SPC
|
Gleisstellpultoption
|
Um dem modularen Kozept Rechnung zu tragen wird die Verwendung von K83 oder DDC Schaltdecodern
die über das Gleis versorgt werden nicht empfohlen. Schaltdecoder sollten statt dessen am PMC betrieben werden. Nähres hierzu im
Kapitel über Peripheriemodule
|
Die
zentralen Komponenten auf obiger Abbildung sind über ein 2-Draht Bus-System miteinander verbunden. Bei dem Bus handelt es sich um
einen RS485-Bus mit einer Datenrate von 62500 Baud. Verwaltet wird die Kommunikation durch den BMC (Basis-Modul-Controller).
Dieser pollt zyklisch die am Bus angeschlossenen Komponenten und fragt dabei an, ob etwas "Neues" vorliegt. Meldet sich eine
Komponente mit einer Information zurück, so wird diese an die anderen Komponenten und - über den IFC (Interface-Controller - PC-Interface)
(RS232- oder USB Schnitstelle) an den PC weitergegeben. Damit bekommen alle Module die Information direkt mit und können sie bei Bedarf
sofort weiterverarbeiten.
Der sogenannte PMC (Peripherie-Modul-Controller), dient zum Anschluss von Peripheriemodulen, wie etwa Rückmeldeenkodern und
Schaltdekodern (siehe weiter unten).
Der USC (Universal-Signal-Controller) erzeugt die Loksteuerbefehle (im Märklin-Motorola-Format oder DCC-Format), die über einen
Booster (z.B. den EDITS-Booster) ans Gleis gelegt werden.
Durch den modularen Aufbau der MoBaSbS kann der Anwender selbst entscheiden, in welchem Umfang und vor allem für welchen
Einsatzzweck er die MoBaSbS aufbauen bzw. verwenden möchte.
Weitere technische Daten...
Die Kommunikation mit dem PC erfolgt über das von der Firma "Lenz Elektronik
GmbH" definierte serielle Protokoll
(19200 Baud). Alternativ kann die Verbindung zum PC auch über die USB Schnittstelle erfolgen. Die MoBaSbS war übrigends meines
Wissens die erste Modellbahn Steuerung, die über eine USB Anbindung verfügte. Mittlerweile gibt es auch von kommerziellen
Anbietern Interface-Bausteine, die über die USB-Schnittstelle mit dem PC kommunizieren. U.a. hat auch die Firma "Lenz Elektronik GmbH"
ein USB-Interface auf den Markt gebracht. Das von der Firma "Lenz Elektronik GmbH" für das USB-Interface definierte
USB-Protokoll
wird von der MoBaSbS ebenfalls unterstützt. Dabei wird kein USB nach RS232 Konverter benutzt! Lediglich 'im' PC wird ein sogenannter
"Virtueller Com-Port Treiber" VCP eingesetzt. Dieser Treiber emuliert intern (im PC) eine serielle Schnittstelle, so dass man die
eingesetzte Steuerungssoftware weiterhin mit einer (virtuellen) seriellen Schnittstelle verbinden kann. Jedoch werden die Daten aber
tatsächlich über den USB Port an die MoBaSbS versendet. Der VCP sowie weitergehende Informationen sind über die Internetseite der Firma
FTDI erhältlich.
Für das freundliche Gespräch mit einem Mitarbeiter der Firma "Lenz Elektronik GmbH", in dem mir die freie Verwendung der oben
genannten Protokolle, sowie des
XpressNetTM für die interenen Abläufe bestätigt wurde, bedanke ich mich hier nocheinmal ausdrücklich.
- Störsichere Kommunikation mit den Peripheriemodulen über RS485 Busse (P-Bus, Peripherie-Bus), differentieller Bus
- 'beliebige' Busarchitektur (Stern-, Stich-, Lineare Struktur)
- große Buslängen möglich (RS485 ist bis 1000m spezifiziert - von mir aber nicht getestet)
- 255 Dekoder- bzw. bis zu 128 Enkoder und 128 Dekodradressen.
- 2048 Schaltausgänge oder 1024 Schaltausgänge und 1024 Rückmeldekontakte
- Info: Es werden 2 Schaltausgänge pro Weiche belegt
- verschiede Dekodertypen verfügbar
- Schaltdekoder (MOSFET) mit 8 Ausgängen
- viele Optionen einstellbar (automatische Abschaltung nach defniertbarer Zeit, Blinken mit definierbarer Frequenz, rot-grün
Schaltung)
- Servodekoder zur Ansteuerung von bis zu 4 Modellbauservos
- 8fach und 24fachRückmeldemodule verfügbar
- Bezugspotential beim Schalten ist das Massepotential (0V)
- optional können Hall-Sensoren angeschlossen werden
Stand: 25.11.2019
Diese Seite unterliegt den Nutzungsbedingungen und der Datenschutzerklärung (siehe weiterführende Links im Impressum) dieser Internetpräsenz
|
